Training models#
Environment setup#
import platform
print(f"Python version: {platform.python_version()}")
Python version: 3.11.1
import torch
print(f"PyTorch version: {torch.__version__}")
PyTorch version: 2.0.1
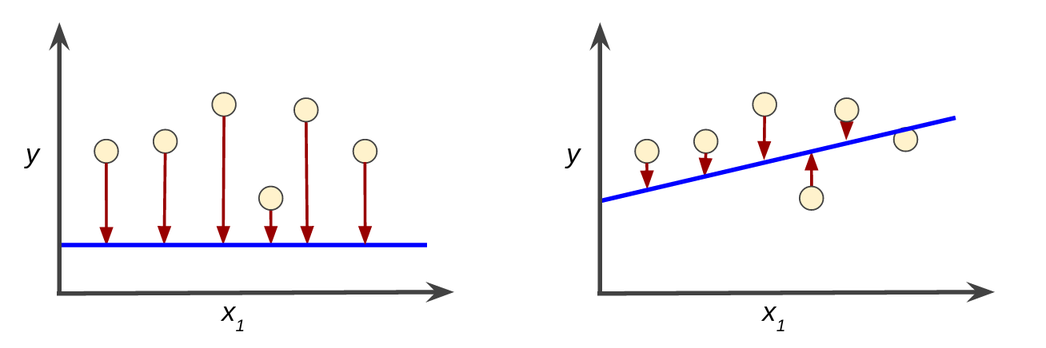
Problem formulation#
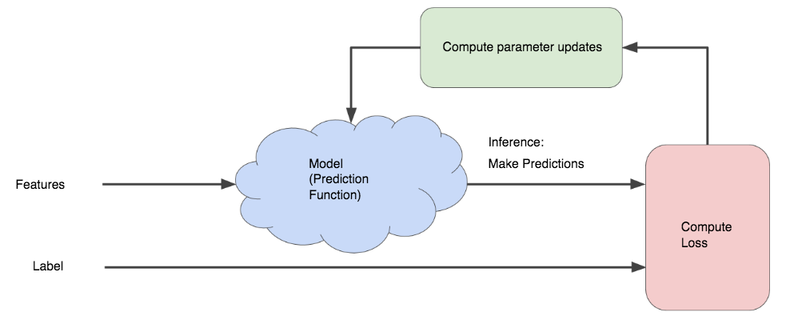
Model lifecycle#
There are two (repeatable) phases:
Training: using training input samples, the model learns to find a relationship between inputs and labels.
Inference: the trained model is used to make predictions.
Parameters Vs hyperparameters#
\(\pmb{\theta}\) (sometime noted \(\pmb{\omega}\)): set of model’s internal parameters, updated during training.
Many models also have user-defined properties called hyperparameters:
maximum depth of a decision tree;
number of layers of a neural network;
…
Contrary to internal parameters, they are not automatically updated during training.
The hyperparameters directly affect the model’s performance and must be tweaked during the tuning step.
Optimization algorithm#
Used during the training phase.
Objective: find the set of model parameters \(\pmb{\theta}^{*}\) that minimizes the loss.
For each learning type, several algorithms of various complexity exist.
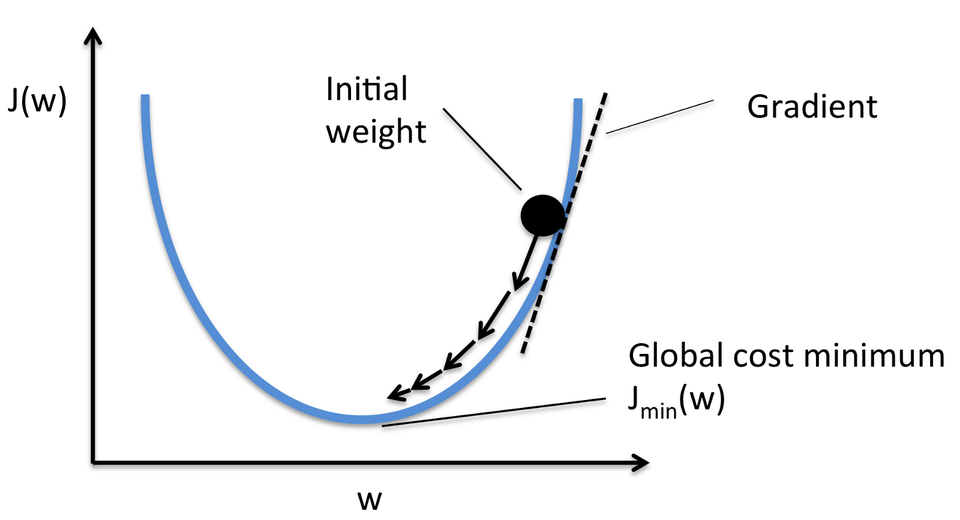
Gradient descent#
An iterative approach#
The model’s parameters are iteratively updated until an optimum is reached.
The gradient descent algorithm#
Used in several ML models, including neural networks.
General idea: converging to a loss function’s minimum by updating model parameters in small steps, in the opposite direction of the loss function gradient.
The notion of gradient#
Expresses the variation of a function relative to the variation of its parameters.
Vector containing partial derivatives of the function w.r.t. each of its \(P\) parameters.
1D gradient descent (one parameter)#
2D gradient (two parameters)#
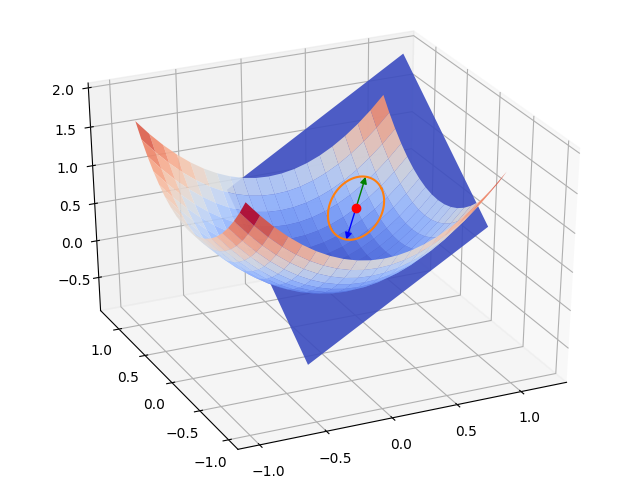
2D gradient descent#
Gradient descent types#
Batch Gradient Descent#
The gradient is computed on the whole dataset before model parameters are updated.
Advantages: simple and safe (always converges in the right direction).
Drawback: can become slow and even untractable with a big dataset.
Stochastic Gradient Descent (SGD)#
The gradient is computed on only one randomly chosen sample whole dataset before parameters are updated.
Advantages:
Very fast.
Enables learning from each new sample (online learning).
Drawback:
Convergence is not guaranteed.
No vectorization of computations.
Mini-Batch SGD#
The gradient is computed on a small set of samples, called a batch, before parameters are updated.
Combines the advantages of batch and stochastic GD.
Default method for many ML libraries.
The mini-batch size varies between 10 and 1000 samples, depending of the dataset size.
Model parameters update#
Learning rate#
\(\eta\) is the update factor for parameters once gradient is computed, called the learning rate.
It has a direct impact on the “speed” of the gradient descent.
Importance of learning rate#
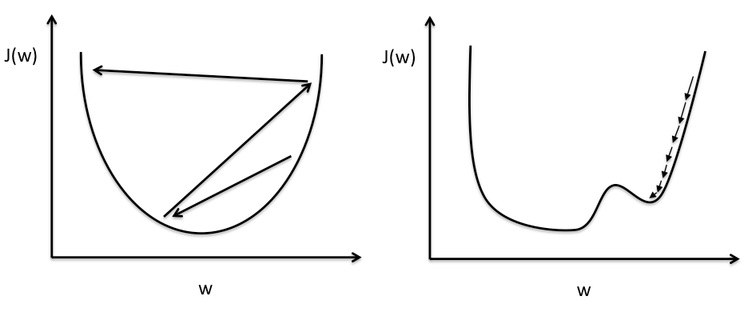
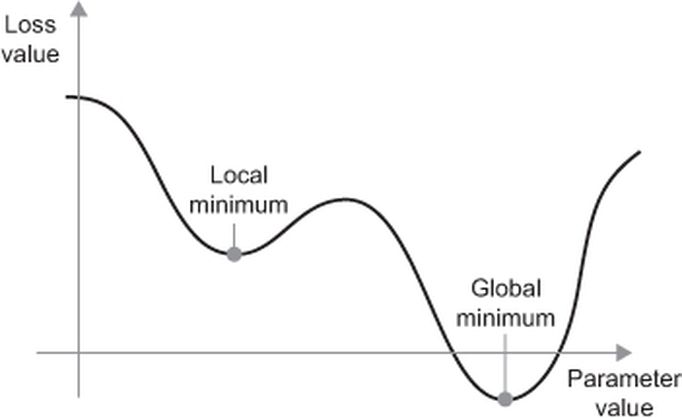
The local minima problem#

Optimization algorithms#
Gradient descent evolution map#

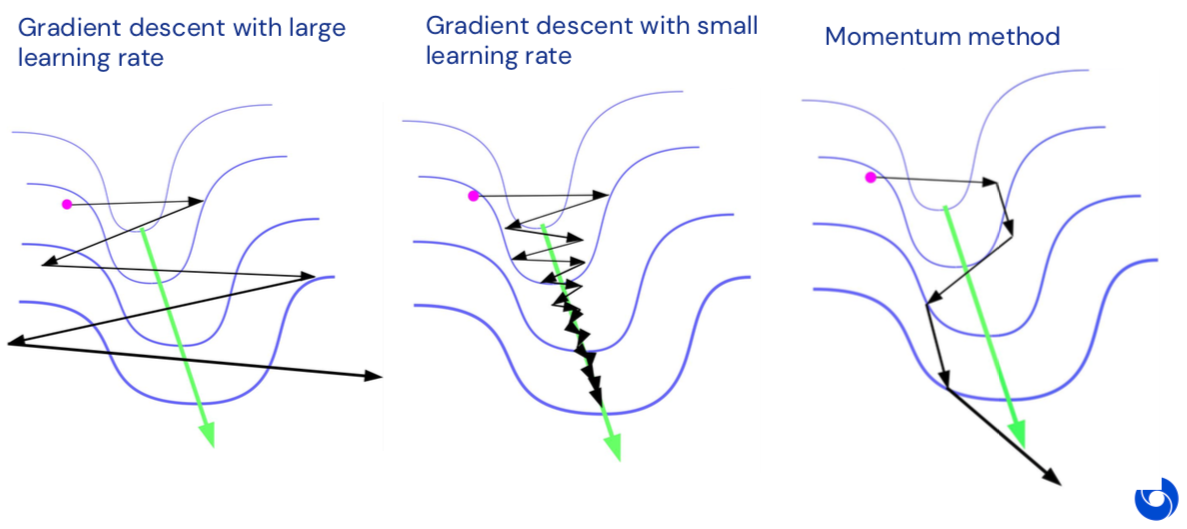
Momentum#
Momentum optimization accelerates the descent speed in the direction of the minimum by accumulating previous gradients. It can also escape plateaux faster then plain GD.

Momentum equations#
\(\beta_k \in [0,1]\) is a friction factor that prevents gradients updates from growing too large. A typical value is 0.9.
Momentum Vs plain GD#
RMSprop#
RMSprop decays the learning rate differently for each parameter, scaling down the gradient vector along the steepest dimensions. The underlying idea is to adjust the descent direction a bit more towards the global minimum.
\(\epsilon\) is a smoothing term to avoid divisions by zero. A typical value is \(10^{-10}\).
Adam and other techniques#
Adam (Adaptive Moment Estimation) combines the ideas of momentum and RMSprop. It is the de facto choice nowadays.
Gradient descent optimization is a rich subfield of Machine Learning. Read more in this article.
Gradients computation#
Numerical differentiation#
Finite difference approximation of derivatives.
Interpretations: instantaneous rate of change, slope of the tangent.
Generally unstable and limited to a small set of functions.
Symbolic differentiation#
Automatic manipulation of expressions for obtaining derivative expressions.
Used in modern mathematical software (Mathematica, Maple…).
Can lead to expression swell: exponentially large symbolic expressions.
Automatic differentiation (autodiff)#
Family of techniques for efficiently computing derivatives of numeric functions.
Can differentiate closed-form math expressions, but also algorithms using branching, loops or recursion.
Autodiff and its main modes#
AD combines numerical and symbolic differentiation.
General idea: apply symbolic differentiation at the elementary operation level and keep intermediate numerical results.
AD exists in two modes: forward and reverse. Both rely on the chain rule.
Forward mode autodiff#
Computes gradients w.r.t. one parameter along with the function output.
Relies on dual numbers.
Efficient when output dimension >> number of parameters.
Reverse mode autodiff#
Computes function output, then do a backward pass to compute gradients w.r.t. all parameters for the output.
Efficient when number of parameters >> output dimension.
Example: reverse mode autodiff in action#
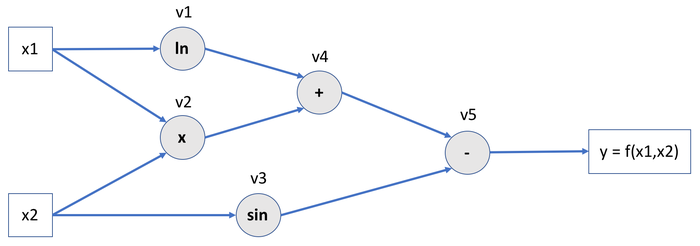
Let’s define the function \(f\) of two variables \(x_1\) and \(x_2\) like so:
It can be represented as a computational graph:
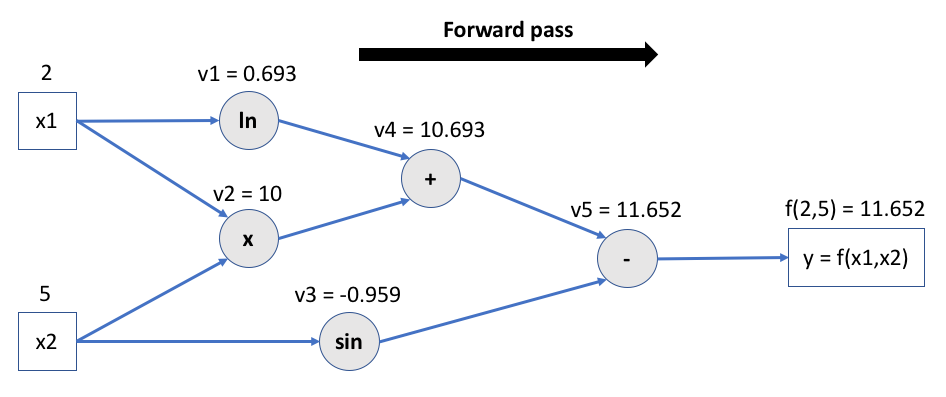
Step 1: forward pass#
Intermediate values are calculated and tensor operations are memorized for future gradient computations.
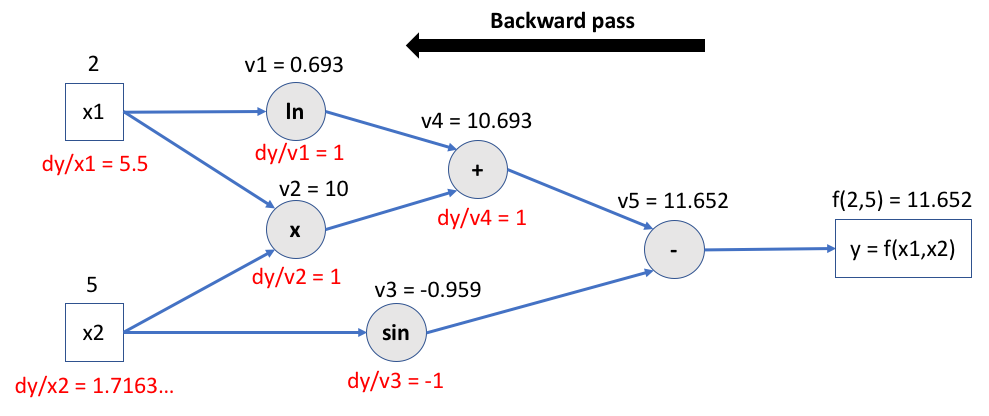
Step 2: backward pass#
The chain rule is applied to compute every intermediate gradient, starting from output.
Autodifferention with PyTorch#
Autograd is the name of PyTorch’s autodifferentiation engine.
If its requires_grad attribute is set to True, PyTorch will track all operations on a tensor and provide reverse mode automatic differentiation: partial derivatives are automatically computed backward w.r.t. all involved parameters.
The gradient for a tensor will be accumulated into its .grad attribute.
More info on autodiff in PyTorch is available here.
# Create two tensors with autodiff activated
# By default, operations are not tracked on user-created tensors
x1 = torch.tensor([2.0], requires_grad=True)
x2 = torch.tensor([5.0], requires_grad=True)
# Compute f() on x1 and x2 step by step
v1 = torch.log(x1)
v2 = x1 * x2
v3 = torch.sin(x2)
v4 = v1 + v2
y = v4 - v3
print(f"v1: {v1}")
print(f"v2: {v2}")
print(f"v3: {v3}")
print(f"v4: {v4}")
print(f"y: {y}")
v1: tensor([0.6931], grad_fn=<LogBackward0>)
v2: tensor([10.], grad_fn=<MulBackward0>)
v3: tensor([-0.9589], grad_fn=<SinBackward0>)
v4: tensor([10.6931], grad_fn=<AddBackward0>)
y: tensor([11.6521], grad_fn=<SubBackward0>)
# Let the magic happen
y.backward()
print(x1.grad) # dy/dx1 = 1/2 + 5 = 5.5
print(x2.grad) # dy/dx2 = 2 - cos(5) = 1.7163...
tensor([5.5000])
tensor([1.7163])
Differentiable programming#
Aka software 2.0.
“People are now building a new kind of software by assembling networks of parameterized functional blocks and by training them from examples using some form of gradient-based optimization…. It’s really very much like a regular program, except it’s parameterized, automatically differentiated, and trainable/optimizable” (Y. LeCun).